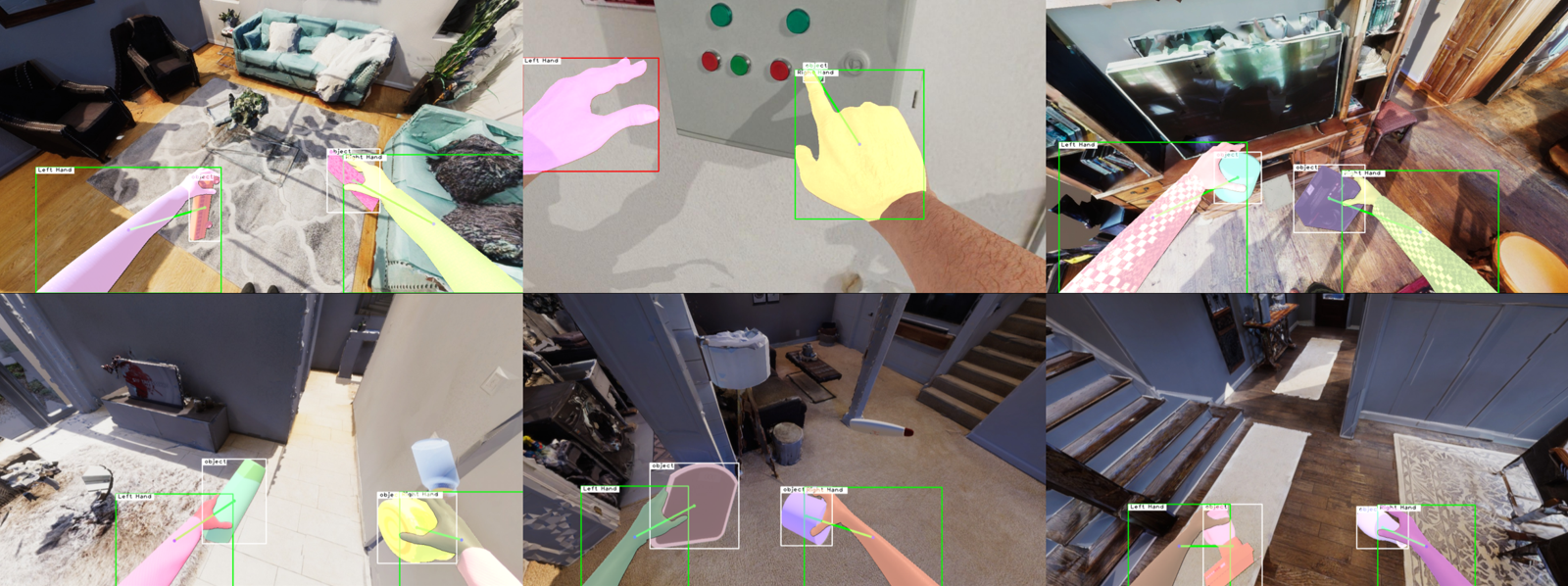
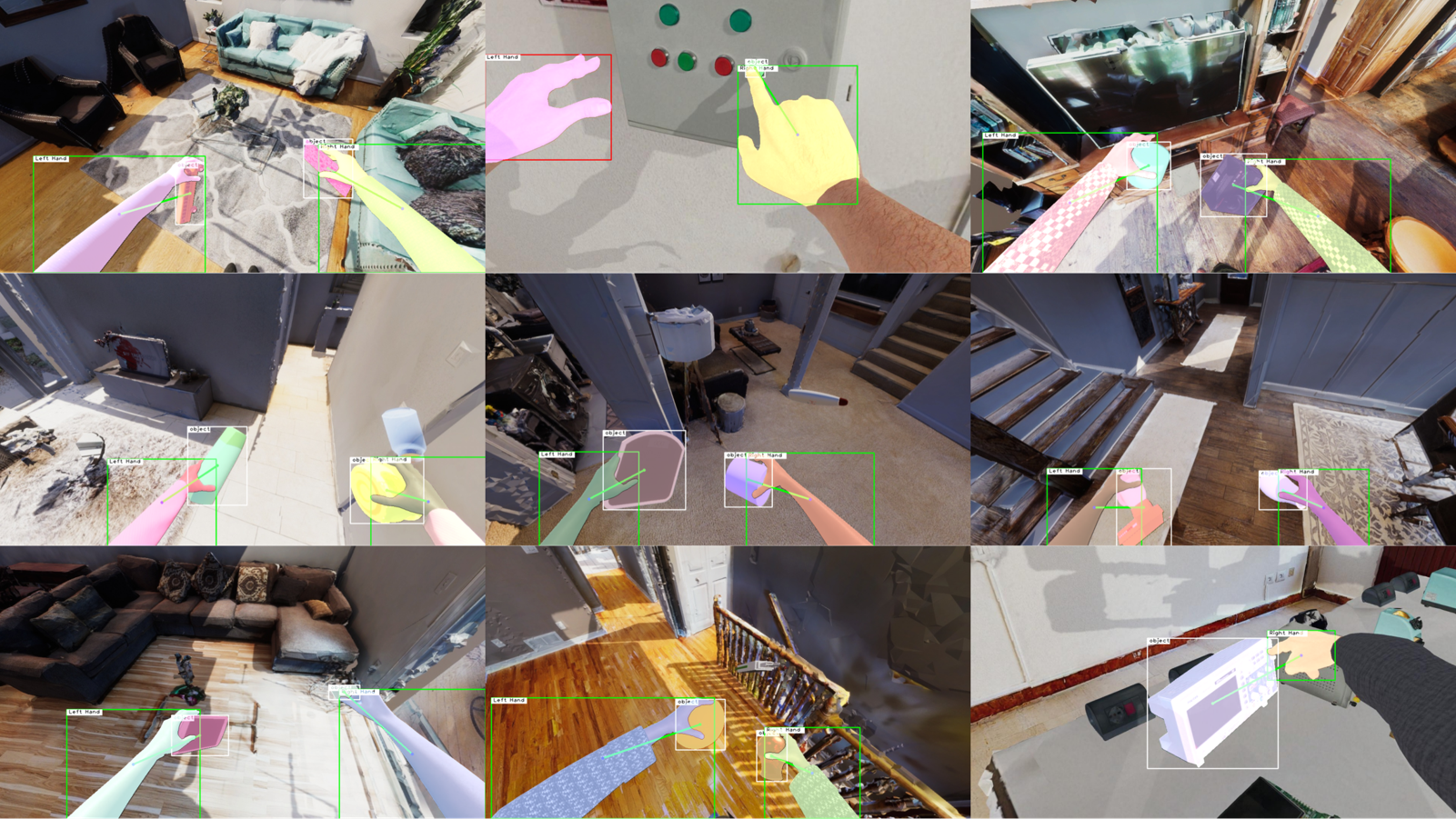
Our pipeline relies on state-of-the-art datasets and components to enable an accurate generation of egocentric images of hand-object interactions. We first select a random hand-object grasp from the DexGraspNet dataset, which is fit to a randomly generated human model and integrated with the appropriate object mesh specified in the hand-object grasp. We then select a random environment from the HM3D dataset and place the human-object model in the environment. We finally place a virtual camera at human eye level to capture the scene from the first-person point of view.
The HOI-Synth benchmark extends three established datasets of egocentric images designed to study hand-object interaction detection, EPIC-KITCHENS VISOR, EgoHOS, and ENIGMA-51, with automatically labeled synthetic data obtained through the proposed HOI generation pipeline.
[NEW] Leonardi, R., Furnari, A., Ragusa, F., & Farinella, G. M. (2026). Leveraging Synthetic Data for Enhancing Egocentric Hand-Object Interaction Detection. International Journal of Computer Vision (IJCV). ArXiv
Leonardi, R., Furnari, A., Ragusa, F., & Farinella, G. M. (2024). Are Synthetic Data Useful for Egocentric Hand-Object Interaction Detection? European Conference on Computer Vision (ECCV). ArXiv
@article{leonardi2025leveraging,
title={Leveraging Synthetic Data for Enhancing Egocentric Hand-Object Interaction Detection},
author={Leonardi, Rosario and Furnari, Antonino and Ragusa, Francesco and Farinella, Giovanni Maria},
journal={International Journal of Computer Vision},
year={2025},
publisher={Springer}
}
Visit our page dedicated to First Person Vision Research for other related publications.